



伺服电机控制器官方版是一款数控系统及其他相关机械控制领域的软件。32路电机控制器最新版能够帮助用户通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位。32路电机控制器软件功能强大,简单易用,能够提高用户的工作效率。
伺服电机控制器功能说明
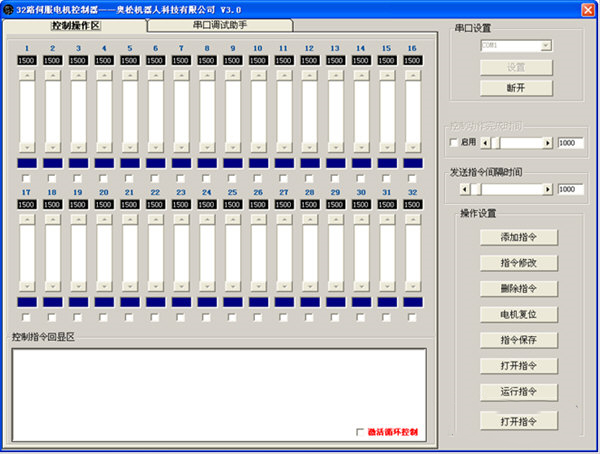
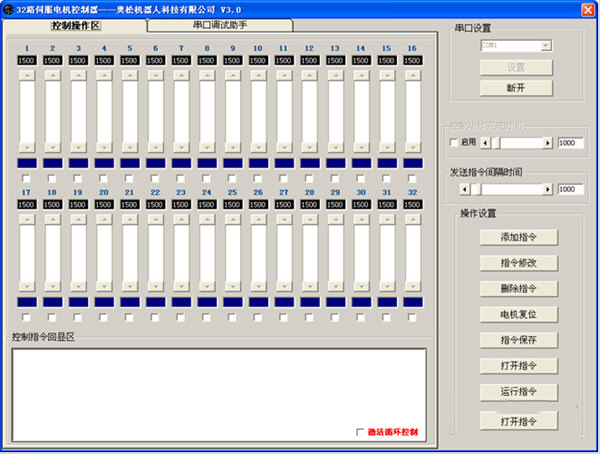
可以同时操控32个模拟舵机的控制器软件,可设置串口号和通信波特率;
可激活或者不激活舵机;
可设置舵机转动速度(默认3000,执行范围可以在1——3000中调节,在舵机位置指示条的下放蓝色小框内输入);
可直接拉动舵机位置指示条来设置舵机,可以在指示条上方白色小框内输入数据来精确定位,500-2500对应-90——+90度,1500对应0度中位点。
熟悉Arduino的人都知道Arduino有一个缺点就是I/O口较少,要想做个智能机器人,一两个舵机再加几个传感器是不行的,若想用Arduino控制十几个甚至二十几个舵机来做各种机器人的话,硬件资源就显得有些力不从心了,我发现32路舵机控制器很好的解决了这个问题,研究明白它与Arduino的通信,控制多个舵机也就变得简单多了。
伺服电机控制器使用场合
(1)电气控制柜内的安装
气控制柜内部电气设备的发热以及控制柜内的散热条件,伺服驱动器周围的温度将会不断升高,所以在考虑驱动器的冷却以及控制柜内的配置情况,保证伺服驱动器周围温度在 55?c 以下,相对湿度 90%以下。长期安全工作温度在 45?c 以下。
(2)伺服驱动器附近有发热设备
伺服驱动器在高温条件下工作,会使其寿命明显缩短,并会产生故障。所以应保证伺服驱动器在热对流和热辐射的条件下周围温度在 55?c 以下。
(3)伺服驱动器附近有振动设备
用各种防振措施,保证伺服驱动器不受振动影响,振动保证在 0.5g(4.9m/s?)以下。
(4)伺服驱动器在恶劣环境使用
伺服驱动器在恶劣环境使用时,接触腐蚀性气体、潮湿、金属粉尘、水以及加工液体,会使驱动器发生故障。所以在安装时,必须保证驱动器的工作环境。
伺服电机控制器注意事项
(1) u、v、w 的接线必须与电机端子 2、3、4 一一对应,注意:不能用调换三相端子的方法来使电机反转,这一点与异步电动机完全不同。
(2)由于伺服电机流过高频开关电流,因此漏电流相对较大,电机接地端子与伺服驱动器接地端子 fg 连接一起,并良好接地。
(3)因为伺服驱动器内部有大容量的电解电容,所以即使切断了电源,内部电路中仍有高电压。在电源被切断后,最少等待 5 分钟以上,才能接触驱动器和电机。
(4)接通电源后,操作者应与驱动器和电机保持一定距离。
(5)长时间不使用,请将电源切断。 (6)旋转方向定义:面对电机轴伸,转动轴逆时针旋转为 ccw 方向,转动轴顺时针旋转为cw 方向。一般称 ccw 为正方向,cw 为负方向。
伺服电机控制器更新日志
日日夜夜的劳作只为你可以更快乐
嘛咪嘛咪哄~bug通通不见了!
华军小编推荐:
伺服电机控制器专业、操作简单、功能强大,软件届的翘楚之一,欢迎大家下载,本站还提供{recommendWords}等供您下载。